无论是can还是RS485通讯,都是为了电池产品之间进行信息交流的作用,但两者也存在不同的波特率,传输速度与距离等存在不同的特点,因为我们进行储能电池系统设计时,就必需考虑两者的性质特点,选择适合电池系统通讯协议,才能发挥电池系统的工作效益。
CAN和RS485具有不同的工作特点和应用场景,选择适合的通信协议取决于具体需求和系统设计。
CAN的工作特点:
1. 优化的冲突检测和容错机制,可以在多个设备同时发送数据时自动解决冲突。
2. 支持多主从通信模式,使得多个设备可以并行进行通信。
3. 高速传输,支持较高的数据传输速率。4. 高可靠性和消息优先级管理,适用于实时性较高的控制系统。
RS485的工作特点:
1. 简单的串行通信格式,适合较低速率的数据传输。
2. 支持多点通信,可以连接多个设备。
3. 较低的成本和易于实施。
4. 有限的抗干扰能力,适用于相对简单的环境。
选择适合的通信协议应考虑以下因素:
1. 传输速率和实时性需求:如果需要高速传输和较高实时性的控制系统,CAN通常是更好的选择。
2. 系统复杂度和拓扑结构:如果系统比较简单且设备数量较少,RS485可以提供足够的功能。
3. 抗干扰需求:如果工作环境有较高的电磁干扰或噪声,CAN的抗干扰能力较强。
选择通信协议应根据具体的应用需求和系统设计来评估,考虑传输速率、实时性、系统复杂度和抗干扰能力等因素。
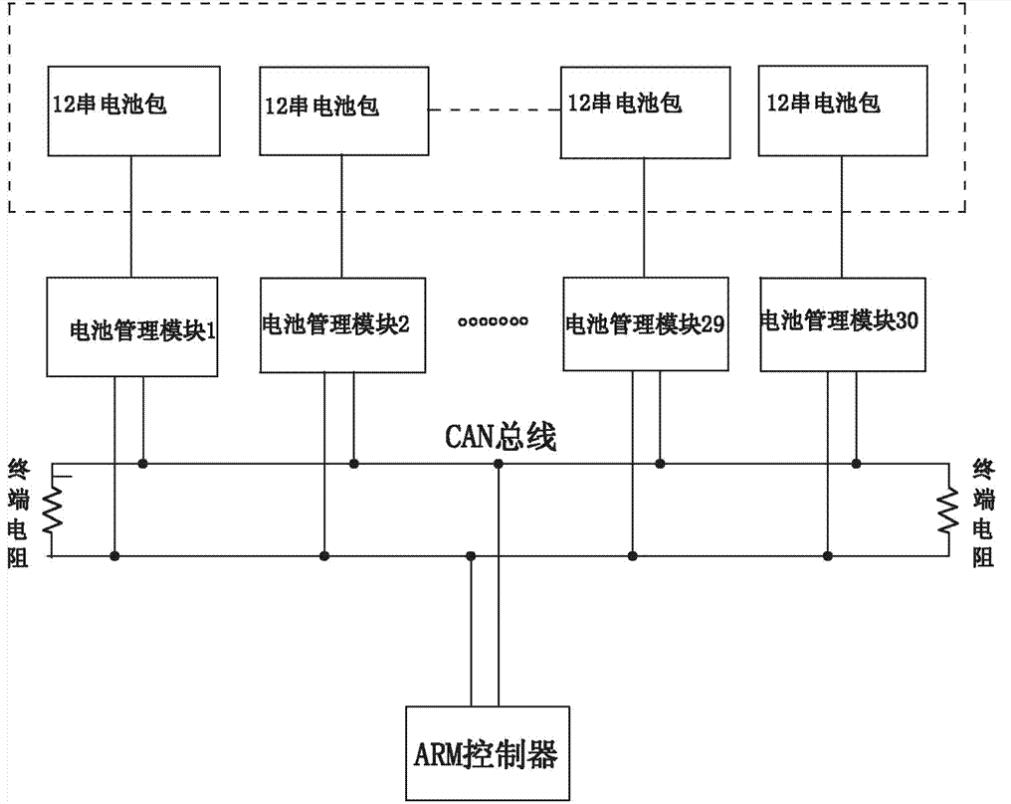
为什么高压储能电池选择CAN协议是较好的选择。
1. 高可靠性和实时性: 储能电池系统通常需要实时监测和控制,以确保安全和性能。CAN协议具有优化的冲突检测和容错机制,可以提供高可靠性和实时性的数据传输。
2. 多主从通信: CAN支持多个设备并行通信,适用于主从架构的电池系统,能够实现主控单元与从机模块之间的高效通信。
3. 抗干扰能力: 储能电池系统常常面临高电磁干扰的环境,CAN协议具有较强的抗干扰能力,可以有效抵御噪声和电磁干扰对通信的影响。
4. 标准化和成熟性: CAN协议是一种被广泛使用和标准化的通信协议,有丰富的生态系统和开发工具支持,可以简化系统设计和开发过程。
针对高压储能电池主从电池之间的通讯,CAN协议是一个较好的选择,提供了高可靠性、实时性和抗干扰能力,同时也有广泛的应用和开发支持。
【声明:文章来源有包含“睿禹能”或"RY"则为源创,请不要复制,所有内容仅供学习参考,不做买卖依据,请以实物为准】