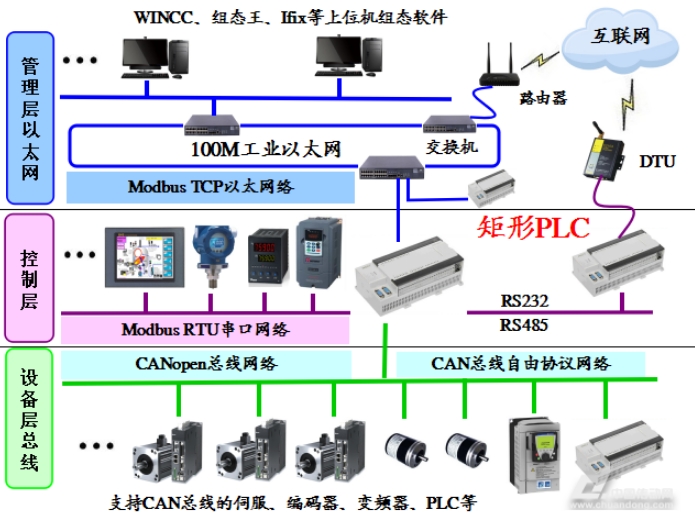
在AGV机器人电池开发中,与车载系统进行通讯方式常采用RS485 和 CAN 的通讯,拥有不同的波特率与传输速度,常用的工业通信方式,它们分别是基于MODEBUS RTU 或CANOPEN通讯协议进行数据交流通讯,正是由于两者具有相同的应用目的与作用,所以我们在设备开发前就要先了解两者之间存在哪些异同之处,下面为你分别介绍它们的特点、作用与工作原理:
一、RS485 通讯
1. 特点:
- 多点通信:可以在一条总线上连接多个设备,最多可连接 32 个节点。
- 远距离传输:理论传输距离可达 1200 米。
- 差分信号传输:抗干扰能力强,能有效减少噪声对信号的影响。
- 半双工通信:同一时刻只能进行发送或接收数据。
- 成本较低:相对于其他通信方式,RS485 的硬件成本较低。
2. 作用:
- 广泛应用于工业自动化、仪器仪表、安防监控等领域,实现设备之间的数据传输和控制。
- 适用于需要长距离传输数据且对成本有一定要求的场景。
3. 工作原理:
- RS485 采用差分信号传输方式,即通过两根信号线(A 和 B)之间的电压差来表示逻辑“0”和“1”。
- 当发送数据时,发送器将并行数据转换为串行数据,并通过差分驱动器将信号发送到总线上。
- 接收器接收到差分信号后,将其转换为并行数据供接收设备使用。
- 多个设备通过总线连接,通过控制信号实现数据的发送和接收切换。
二、CAN 通讯
1. 特点:
- 多主通信:多个节点可以同时发送和接收数据,不存在主从关系。
- 高可靠性:具有错误检测、错误通知和错误恢复机制,确保数据传输的可靠性。
- 实时性强:数据传输速度快,响应时间短,适用于对实时性要求较高的系统。
- 远距离传输:最远可达 10 千米(取决于传输速率)。
- 灵活的拓扑结构:可以组成总线型、星型、树型等多种拓扑结构。
2. 作用:
- 主要应用于汽车电子、工业控制、航空航天等领域,用于实现分布式系统中各个节点之间的通信和控制。
- 适用于对可靠性和实时性要求较高的复杂系统。
3. 工作原理:
- CAN 总线采用串行通信方式,通过两根信号线(CAN_H 和 CAN_L)传输数据。
- 当一个节点发送数据时,它将数据封装成报文格式,并通过 CAN 控制器发送到总线上。
- 总线上的其他节点接收到报文后,根据报文的标识符判断是否需要接收该数据。
- 如果节点需要接收数据,它会将报文存储在接收缓冲区中,并进行相应的处理。
- CAN 总线通过仲裁机制来解决多个节点同时发送数据时的冲突问题。
CAN 通讯一般有两条信号线 CAN_High(CAN_H)和 CAN_Low(CAN_L),在一些情况下会有一条接地线,但接地线并非是 CAN 通讯的必需组成部分。
接地线主要起到以下作用:
1. 提供信号参考地,有助于稳定信号电平,减少干扰。
2. 为系统中的各个设备提供共同的电位参考,防止因电位差引起的干扰和损坏。
在实际应用中,是否需要接地线以及如何连接接地线,需要根据具体的系统要求和电气环境来确定。如果系统对信号的稳定性和抗干扰能力要求较高,或者存在较大的电气噪声,那么添加接地线可能会有助于提高 CAN 通讯的性能。但如果系统设计合理,并且电气环境相对较好,不使用接地线也可能正常工作。
总之,RS485 和 CAN 通讯各有其特点和适用场景。RS485 适用于成本较低、对实时性要求不高的多点通信场景;而 CAN 通讯则适用于对可靠性和实时性要求较高的多主通信场景。在实际应用中,需要根据具体需求选择合适的通信方式。
三、RS485与CAN只负责数据通讯传输,但它们不能进行信息交换,还需要借助相关协议进行数据交换才能实现通讯:
1、RS485
RS485 本身只是一种物理层的电气标准,它并不定义通信协议。通常可以使用以下一些协议进行信息交换:
- Modbus 协议:这是一种广泛应用于工业领域的通信协议。它定义了数据帧的格式、地址分配、功能码等。通过 Modbus 协议,不同设备可以在 RS485 总线上进行数据读写操作,实现设备之间的控制和监测。例如,在工厂自动化系统中,PLC(可编程逻辑控制器)可以使用 Modbus 协议通过 RS485 与各种传感器和执行器进行通信。
- Profibus 协议:主要用于工业自动化系统中的分布式 I/O(输入/输出)和现场设备通信。它支持高速数据传输和复杂的设备配置。在汽车制造、化工等行业中,Profibus 协议与 RS485 结合使用,可以实现设备之间的实时通信和协同工作。
二、CAN
CAN 总线也只是一种物理层和数据链路层的标准,同样需要上层协议来进行具体的信息交换。
- CANopen 协议:是一种基于 CAN 总线的高层协议。它定义了设备的对象字典、通信对象和服务等,使得不同厂家的设备可以在 CAN 总线上实现互操作性。例如,在机器人控制系统中,各个关节控制器可以使用 CANopen 协议进行通信,实现精确的运动控制。
- J1939 协议:主要应用于商用车和重型设备领域。它定义了一系列的报文格式和参数,用于车辆的诊断、控制和通信。例如,在卡车和客车中,发动机控制单元、变速器控制单元等可以通过 J1939 协议在 CAN 总线上进行通信,实现车辆的高效运行和故障诊断。
总之,RS485 和 CAN 只是提供了数据传输的物理通道,具体的信息交换需要依靠特定的通信协议来实现。不同的协议适用于不同的应用场景,用户可以根据实际需求选择合适的协议。
在 CAN 通讯中,标准帧和扩展帧的传输速度理论上可以相同,但在实际应用中可能会受到一些因素的影响而有所不同。
CAN 总线的传输速度主要由以下几个因素决定:
1. 总线波特率:这是决定 CAN 总线传输速度的关键因素。无论使用标准帧还是扩展帧,如果总线的波特率设置相同,那么在理想情况下它们的传输速度是相同的。例如,当波特率设置为 500Kbps 时,标准帧和扩展帧都可以以这个速度进行数据传输。
2. 帧长度:一般来说,扩展帧由于标识符长度更长,可能会比标准帧稍微长一些。在相同的波特率下,较长的帧可能需要更多的时间来传输。但是,这种差异通常非常小,在一些对实时性要求不高的应用中可以忽略不计。
3. 总线负载:如果总线上的节点数量较多,通信频繁,总线负载较高,那么无论是标准帧还是扩展帧的传输速度都可能会受到影响而降低。例如,在一个汽车电子系统中,如果多个电子控制单元同时发送大量的数据,总线负载增加,可能会导致传输速度下降。
4. 硬件性能:不同的 CAN 控制器和收发器的性能也可能会影响标准帧和扩展帧的传输速度。一些高性能的硬件设备可能能够更快速地处理和传输数据,而低性能的设备可能会导致传输速度较慢。
综上所述,CAN 通讯中标准帧和扩展帧的传输速度在理论上可以相同,但在实际应用中可能会受到多种因素的影响而有所不同。在设计和使用 CAN 总线系统时,需要根据具体的应用需求和硬件条件来综合考虑这些因素,以确保系统的性能和可靠性。
【声明:文章来源有包含“睿禹能”或"RY"则为源创,请不要复制,所有内容仅供学习参考,不做买卖依据,请以实物为准】